В Гарварде создали роботопчел
- 06 ноября 2019 12:05
- Эрика Ефремова, журналист «Ридуса», отдел «Наука и технологии»
© pixabay.com
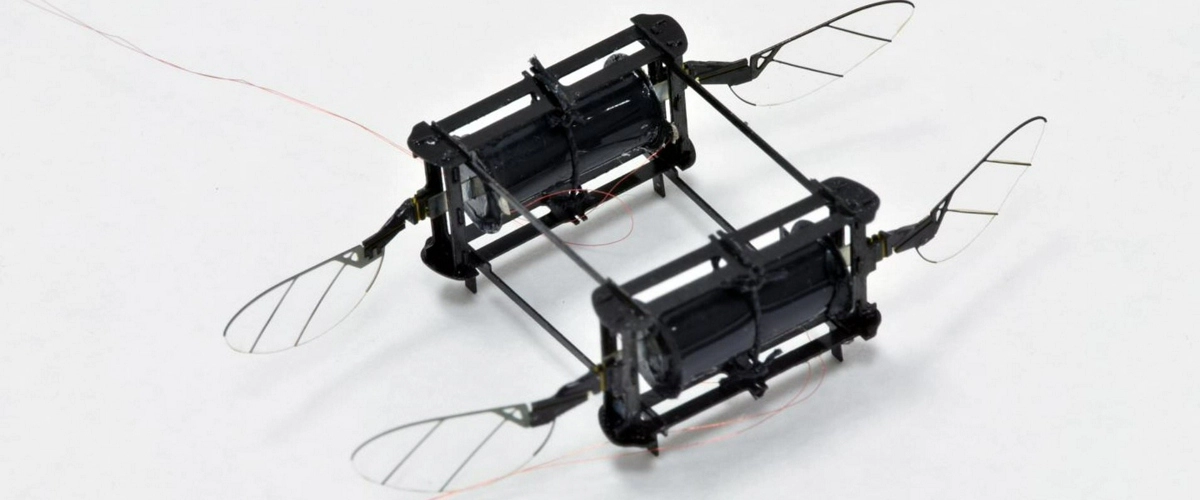
Команда изобретателей из Гарвардского университета показала свою новую разработку — летающего робота на мягких приводах под названием Робопчела.
Такое новшество поможет роботу лучше ориентироваться в пространстве во время полета, а в случае столкновения с препятствиями мягко в них врезаться.
Мы давно думали над созданием мягкого робота, так как обычные машины крайне непрактичны на испытательных этапах. Если немного не рассчитать силу, можно разбить робот на первых же испытаниях. При создании мягкого робота мы также столкнулись с проблемой прочности таких устройств, но смогли усовершенствовать технологию, — рассказали инженеры.
Специалисты из лаборатории микроробототехники Гарвардского университета пояснили, что в современном мире большой спрос на мобильных мягких роботов. Они удобны в использовании, и им можно поручать различные задачи.
Но летающие мягкие роботы — это новинка не только для британских инженеров, но и для мира робототехники в целом.
Многие разработчики скептически отнеслись к таким устройствам, так как удельная мощность этих приводов недостаточно высока и ими трудно управлять. Но авторы нового проекта смогли доработать Роботопчелу, чтобы у ее приводов была высокая удельная мощность и управляемость.
Для этого ученые использовали приводы, сделанные из диэлектрических эластомеров — мягкого материала с хорошими изоляционными свойствами. Уточняется, что они умеют деформироваться под действием электрического поля.
Этот механизм не только безопасен, если робот случайно врежется в стену, но и выгоден для производителя, так как в случае поломки его можно будет быстро и дешево починить.
В ходе испытаний разработчики создали несколько моделей роботизированных пчел и испытали их в лабораторных условиях. Лучше всего показали себя пчелы с четырьмя крыльями. Такие образцы могли не только летать в узких пространствах, но и и уворачиваться от других пчел.
- Телеграм
- Дзен
- Подписывайтесь на наши каналы и первыми узнавайте о главных новостях и важнейших событиях дня.
Войти через социальные сети: