Двуногого робота научили ходить по камням разной высоты
- 27 июня 2018 18:29
- Эрика Ефремова, журналист «Ридуса», отдел «Наука и технологии»
Инженеры из Америки придумали алгоритм, с помощью которого двуногий робот может перемещаться по сложным поверхностям, например, шагать по выступам, которые имеют разную высоту и расположены вдалеке друг от друга.
Авторы проекта надеются, что способности робота можно будет применить при выполнении опасных миссий, например, поиск людей под завалами или при прохождении сложного рельефа.
У многих специалистов из области робототехники в последние годы стояла задача создать робота-вездехода. Сначала разработчики использовали колеса или гусеничные приводы, но методом проб и ошибок ученые пришли к выводу, что самым лучшим способом являются роботизированные ноги.
На рынке уже известно несколько двуногих гуманоидов, которые неплохо владеют своим телом. Например, японский робот-физрук, который умеет подтягиваться, качать пресс, отжиматься, играть в бадминтон и даже делать упражнение «лодочка».
Также недавно «Ридус» рассказывал о роботе по имени Atlas, который выполняет сальто-мортале — сложный акробатический прыжок с переворотом через себя.
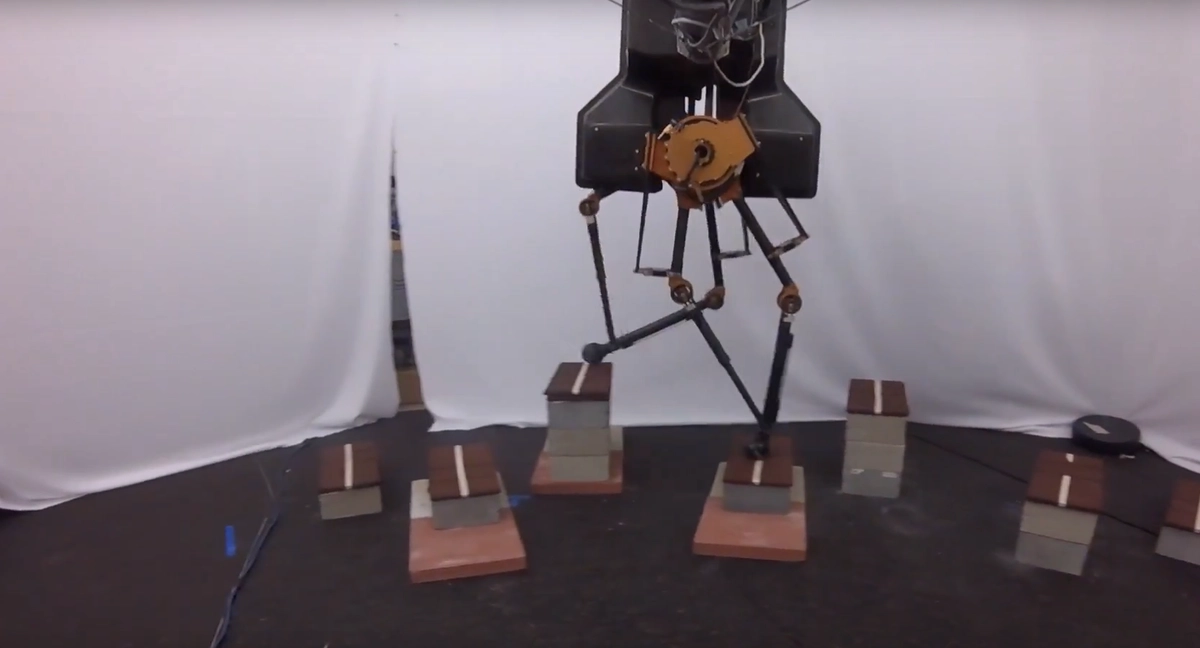
На этот раз ученые из Университета штата Орегон научили робота проходить сложные препятствия, в которых важна не только внимательность, но и координация.
Они использовали исследовательского робота ATRIAS, который имеет две механические ноги, управляемые моторами. Корпус робота соединен с поворотным механизмом, вокруг которого происходит ходьба.
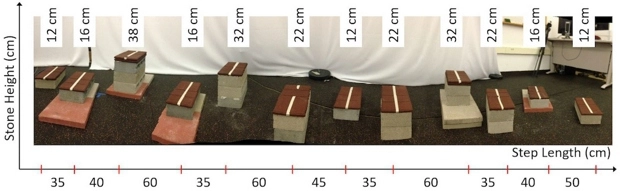
Чтобы проверить способности робота ученые разложили кирпичи, по которым машине пришлось передвигаться. Причем размер шага робота менялся от 30 до 65 сантиметров, а высота препятствий достигала от 12 до 38 сантиметров.
Стоит отметить, что этот робот не использует камеры для прокладывания маршрута, он опирается на алгоритм, который после каждого шага анализирует обстановку.
Сейчас ученые работают над тем, чтобы научить робота анализировать дорогу с помощью машинного зрения.
- Телеграм
- Дзен
- Подписывайтесь на наши каналы и первыми узнавайте о главных новостях и важнейших событиях дня.
Войти через социальные сети: